虚拟机安装
如果你仍在学习过程中,建议使用虚拟机的方式安装,虚拟机方式的安装与实体机安装大同小异 建议参考如下文章进行安装 http://www.autolabor.com.cn/book/ROSTutorials/chapter1/12-roskai-fa-gong-ju-an-zhuang.html
实体机安装
一个真正的机器人运行时需要在实体机安装。 可以参考如下文字 https://blog.csdn.net/m0_60190682/article/details/118723468 也可以使用搜索引擎搜索"u盘安装 ubuntu20.04"
安装建议
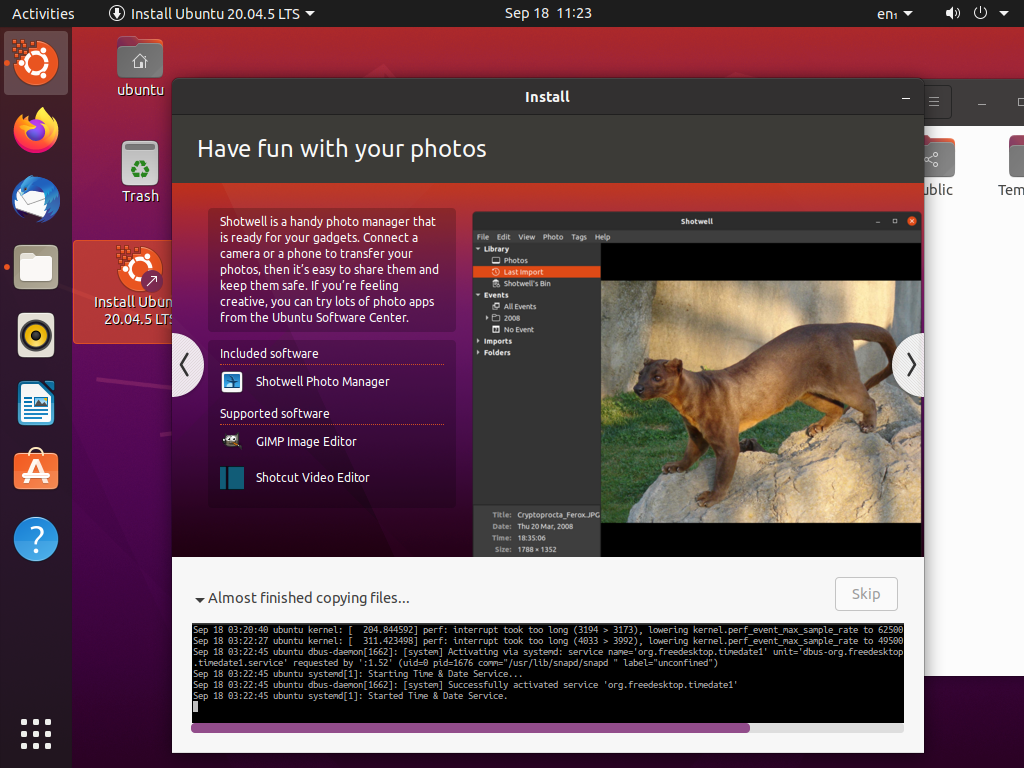
安装界面大概如下图所示,
-
建议安装之前先断网,否则安装过程可能会自动更新,而未换源之前更新将直接连接国外服务器,会导致安装进度巨慢无比。建议断网安装结束后,进系统后手动换源后手动更新。
-
建议安装使用英文界面,不过Linux下中文不会像Windows那样轻易出现乱码情况(统一UTF-8编码),但是在纯终端界面下将会出现中文方块的情况。
虚拟机增强工具
PS: 该内容仅虚拟机安装的用户需要关注。
当我们安装完虚拟机后,通过安装虚拟机增强工具可以使得虚拟机与物理机进行方便地交互。
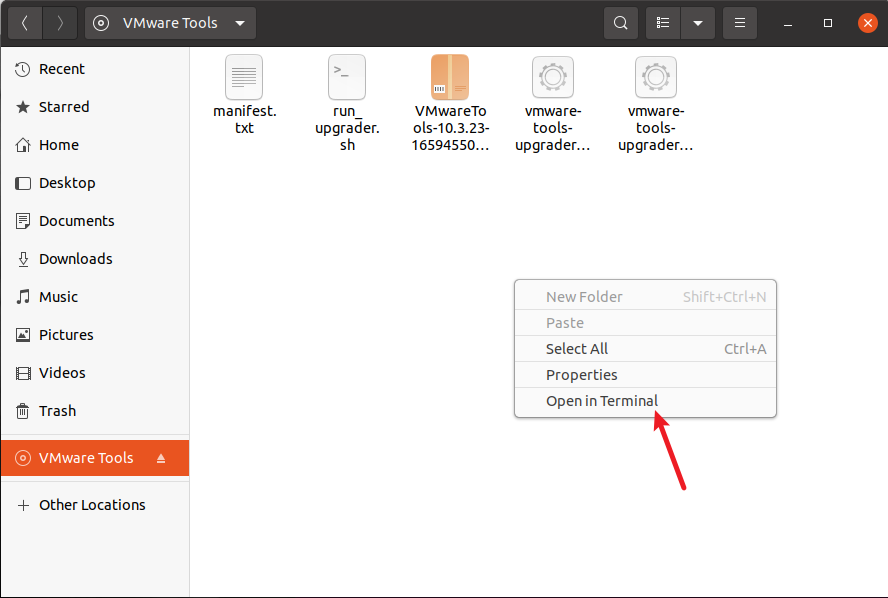
如果我们使用的是VMware虚拟机,那么我们可进行如下操作,

然后我们发现出现了一个光盘设备,在此处打开终端
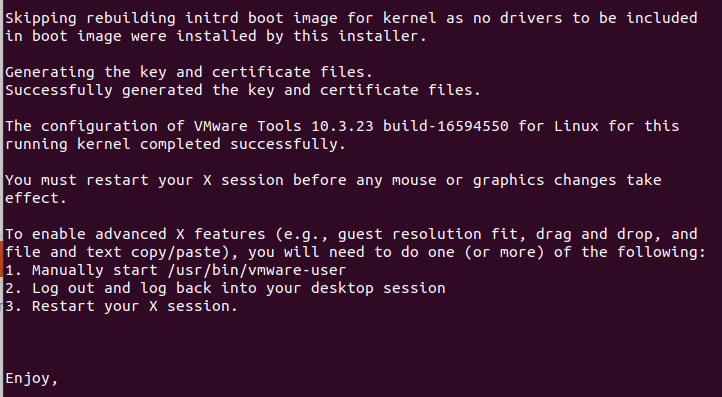
当提示上述信息时,增强工具便安装成功,然后可以输入reboot命令重启电脑。
重启之后你会发现虚拟机的分辨率将会随着虚拟机窗口而进行缩放,剪切板也可相互共享,大大提高的虚拟机的便捷性。
系统更新
断网安装完系统之后,就可以联网了。
由于现在Ubuntu 22.04已发布,可能会弹窗提示升级Ubuntu 22.04,请不要升级,因为后面我们需要安装的ROS1 的noetic发行版是需要绑定Ubuntu 20.04的发行版的。
需要先更换国内源,可以参考以下清华源或科大源的文档。
ubuntu | 镜像站使用帮助 | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
Ubuntu 源使用帮助 — USTC Mirror Help 文档
更换国内源后便可通过以下命令更新apt源
sudo apt update
再运行以下命令执行系统软件包更新
sudo apt upgrade -y
更新完毕
中文输入法
中文输入法很有用,不管是写代码注释还是上网搜索均需要使用到中午输入。
如果你安装的是中文ubuntu,则已经会自带一个中文输入法;如果你安装的是英文ubuntu,则不会自带中文输入法。
不过,系统自带的中文输入法个人感觉较为难用。在此推荐安装使用搜狗输入法。
官网已有详细的安装说明,再次不展开赘述。(需要严格执行官方帮助中的每一条命令,如果输入法还是无法正常使用,请再次重复执行)
将搜狗输入法加入输入法列表中。
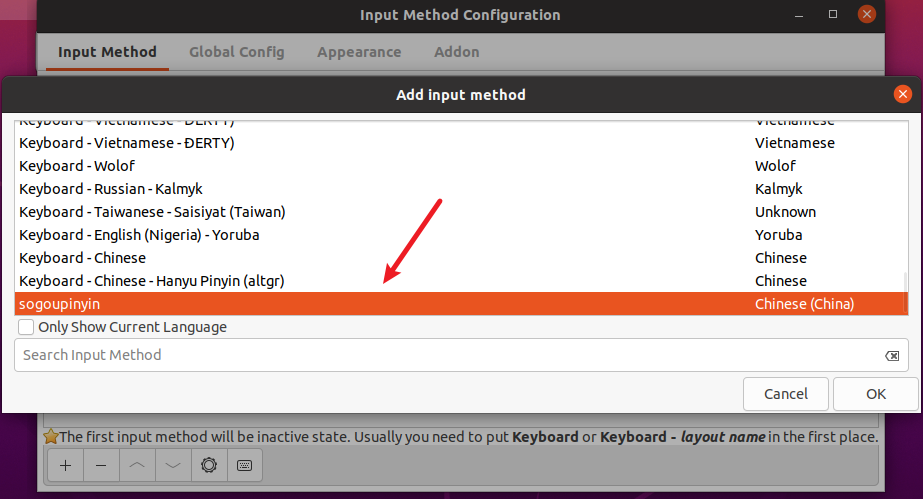
此时已经能够输入中文了